转动群
SO(3)群的描述
在 刚体力学 中曾谈到了欧拉转动角表述。现在我们用同样的办法(但是不同的约定)来描述SO(3)群的元素:
这里的转动约定是:
- 先绕$z$轴转动$\alpha$角;
- 再绕$y’$轴转动$\beta$角;
- 最后绕$z’’$轴转动$\gamma$角。
SU(2)群的描述
考虑SU(2)群的酉表示:
其中$a,b\in\mathbb{C}$,满足归一化条件:
SO(3)和SU(2)的关系
直观理解
令$a=x_1+ix_2$,$b=x_3+ix_4$,则SU(2)的归一化条件等价于:
这是一个四维球面方程,共有三个自由度。
而SO(3)的转动角$\alpha,\beta,\gamma$同样反映了三个自由度。这说明SO(3)和SU(2)之间存在一种对应关系(但并非一一对应,而是二重覆盖,我们后面会谈到)。现在我们用知乎·東雲正樹和知乎·高堡名人的回答来理解这一问题。
SO(3)群的元素对应了三维空间的转动,该转动可以用三维空间的矢量$\vec{\omega}$来描述,矢量的方向即是转动轴,大小即是转动角。SO(3)群的元素可以表示为三维空间中半径为$\pi$的球内的点。
但要注意的是,在球面上,由于$\vec{\omega}$和$-\vec{\omega}$表示同一个转动(顺时针转动$\pi$和逆时针转动$\pi$),因此SO(3)群的元素实际上对应于了一个开球$x_1^2+x_2^2+x_3^2<\pi^2$和半个球面$x_1^2+x_2^2+x_3^2=\pi^2,x_3>0$(专业称呼为对径认同)。
而SU(2)群的元素对应于四维空间中的单位球面$x_1^2+x_2^2+x_3^2+x_4^2=1$,这实际上是对应了两个SO(3)群的三维球:
故而SU(2)群的元素可以看作是SO(3)群的元素的二重覆盖,即SU(2)到SO(3)的同态映射是二对一的。
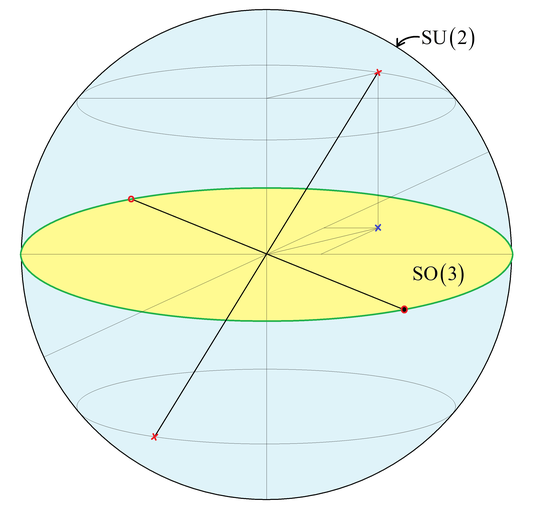
可以参考此图进行理解。将三维球面$S^3$的SU(2)降维到如图所示的蓝色二维球面$S^2$,将对径认同的的三维球体$B^3$的SO(3)降维到如图所示的黄色二维圆盘。此时,非边界(绿色圈)处的蓝色球面上的两个红色叉对应黄色圆盘上的蓝色叉,边界处的两个红色圈(由于径认同)对应黑色圈。
你可能早就见过如下表达式了:
从这里看,二重覆盖关系是显然的,但是我们在下面推导二者关系的时候使用欧拉角表述,也可以看到二重覆盖关系。
数学描述
通过泡利矩阵:
可以将二维矩阵和空间矢量联系起来:
现在空间矢量有两种表示形式,且可以被SU(2)和SO(3)群的元素作用。理论上,两种作用应该等价:
使用SU(2)元素对该矩阵作用:
使用SO(3)元素对该矢量作用:
二者联立,可确定了从SU(2)到SO(3)的映射关系:
显然,反解该关系可以得到SO(3)到SU(2)的映射关系:
其中,$\mathbf{U}$同样可以被分解为三个转动矩阵:
SU(2)和SO(3)的不可约表示
求解SU(2)和SO(3)的不可约表示的基本思路如下:
- 构建线性函数空间$\mathcal{L}^j$,$j$是不可约表示的标记;选取每一个函数空间中的基函数组:其中,基函数可以选取为:
- 定义SU(2)的群元对应的作用算符$\hat P_{\mathbf{U}}$,它可以把多项式基函数映射到另一个多项式函数,具体的作用方式如下(由群的性质限制):
- 同时,出于基函数组的完备性,任意一个多项式函数都可以用基函数组展开:和上式联立,即可得到$D^{(j)}_{m’m}$的具体形式。$D^{(j)}$是SU(2)的以$j$标记的不可约表示。
先计算三种最简单的情况,分别对应$\alpha=0,\beta=0,\gamma=0$。
$\alpha=0$时($\gamma=0$同理):
所以:
$\beta=0$时:
利用二项式定理展开:
现在把$x$的幂指数换元为$x_1^{j-m’}x_2^{j+m’}$的形式:
于是:
所以:
考虑阶乘内部不能有负数,因此求和范围为:
把三种情况组合起来,就是:
另一种表示是:
可以计算出一些具体的不可约表示:
- $j=0$时:是平凡表示:
- $j=1/2$时:
- $j=1$时:
可以看到,矩阵满足:
所以当$j$为整数时,$D^{(j)}(-u)=D^{(j)}(u)$,而当$j$为半整数时,$D^{(j)}(-u)=-D^{(j)}(u)$。其对应图如下:
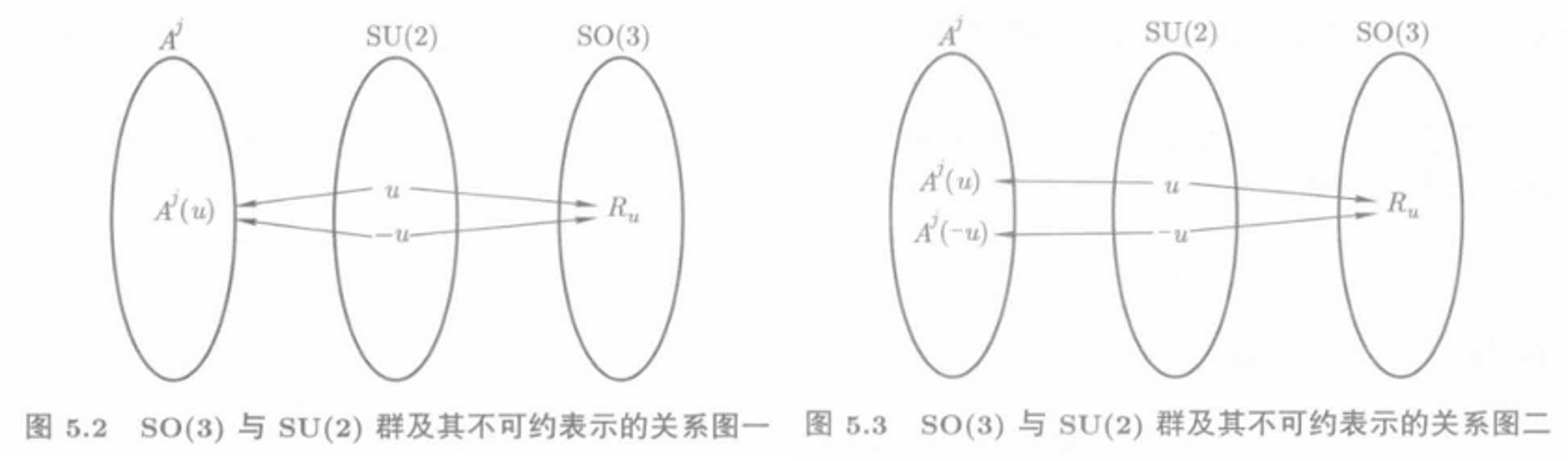
可见当$j$为整数和半整数时,构成SU(2)的所有不可约表示;当$j$为整数时,构成SO(3)的所有不可约表示。