小振动
理论框架
矩阵方程
我们接下来讨论保守力学系统在稳定平衡位形附近作小振动的情况。解析写出拉格朗日量:
在平衡位置附近,势能可以用泰勒公式展开:
平衡位置处$\left( \dfrac{\partial V}{\partial x_i} \right)_0 = 0$,保留至二次项,取$x_{i0}=0,V(x_{10}, x_{20}, \cdots, x_{n0}) =0$:
$\mathbf{M}$和$\mathbf{K}$是天然的正定二次型,这点将在后续证明特征值小于零用到。代入欧拉-拉格朗日方程:
得到
对于$n$个自由度的系统,该矩阵方程最多确定n个特征值$\lambda_i$,满足:
将其代入矩阵方程,得到特征值方程:
这个方程若有非零解,则必须满足行列式为零:
最终的运动解可以使用特征解的线性组合表示:
特征频率
从该方程:
进行变形,可以得到:
由于$\mathbf{K}$是正定的,$\vec{x}^T \mathbf{K} \vec{x}>0$,而$\mathbf{M}$也是正定的,$\vec{x}^T \mathbf{M} \vec{x}>0$,因此特征值$\lambda_i$都是小于零的,说明都是虚数。引入特征频率:
最终的运动解可以写成:
相应的矩阵方程变为:
不难发现,求解特征频率的过程实际上是求解一个广义特征值问题:
我们的目的是确定特征值矩阵$\mathbf{\Omega}^2$和相似变换矩阵$\mathbf{U}$:
此时,可令:
同时:
这意味着两个矩阵是同时被对角化的。代入拉格朗日量:
至此,我们将拉格朗日量分解为$n$个独立的简正模式系统。
双摆
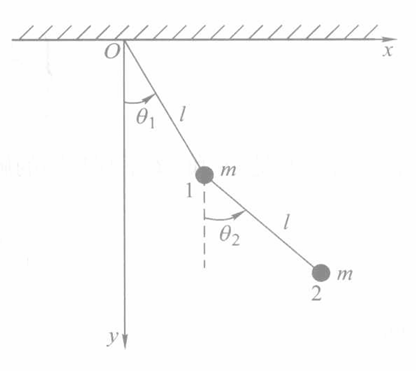
此前我们曾得到了双摆的拉格朗日量:
在小角近似下:
将其写成矩阵形式:
求解特征值方程:
得到以下方程:
解得:
对于质量相等$m_1=m_2=m$,摆长相等的情况,可以进一步简化为:
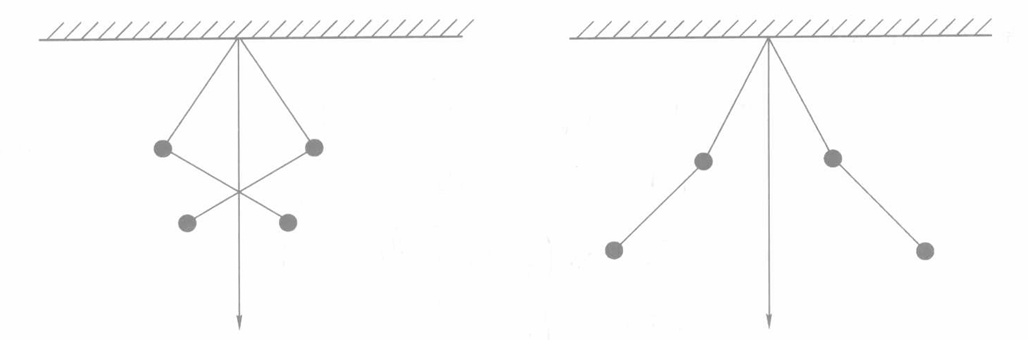
分别对应两种振动模式:
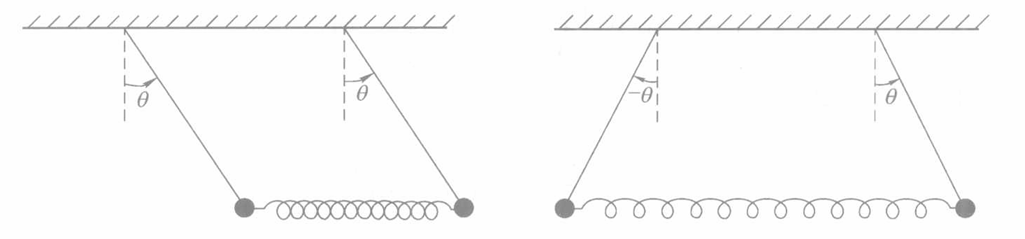
耦合摆
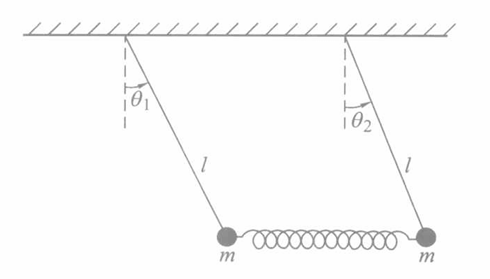
写出拉格朗日量:
将其写成矩阵形式:
解得:
分别对应两种振动模式: